Submitted by ben on Fri, 02/11/2011 - 09:25
I have written Python tools to interface with the Agilent DSO3000-series oscilloscopes. This is an update of my previous work. As long as PyUSB is available, this should be cross-platform. Command-line and console programs are included, along with a DSO3000 class you can use to make automated data-collection scripts. There is now a screenshot program which uses PIL. Read more »
Submitted by ben on Sun, 11/07/2010 - 01:57
The SICK NAV200 is a 360-degree scanning LIDAR with a range of about 4m unless retroreflectors are used. It is sold as a navigation sensor for autonomous ground vehicles in factories. In its intended application, retroreflectors are positioned around the factory and their locations are given to the sensor. The sensor then calculates its position in the environment from the observed positions of the reflectors. Read more »
Submitted by ben on Sat, 11/06/2010 - 00:17
I am designing a complete rebuild of the quadrotor. The new design will focus on minimizing weight while integrating the sensors and processing needed for autonomous flight. Where revision 2 used a Wiimote and offboard processing, revision 3 will use an IMU-3000 and ADXL-345 for inertial sensing and a Gumstix Overo Fire module for processing. The same motors and battery will be used. The motor drivers and propellers will be reused initially, but may be replaced later. Read more »
Submitted by ben on Sat, 11/06/2010 - 00:12
This is a small ground vehicle I built as a platform for working on SLAM algorithms. It has a NAV200 LIDAR, a pan/tilt camera, WiFi, and tank drive with two DC motors. A Beagle Board for processing. An ATmega16 AVR microcontroller generates PWM signals for the DRV8801 motor drivers (the OMAP chip on the Beagle Board could do this, but I need other I/O as well, so it was easier to put everything in the ATmega). Read more »
Submitted by ben on Sat, 11/06/2010 - 00:03
This is a tracking generator for the Tektronix 492 based on KE5FX's design. It takes the place of a TR-503 tracking generator but has a different architecture. The design is essentially the same as KE5FX's, but uses attenuator/amplifier pairs instead of isolators and has a different PLL circuit for generating the 110MHz LO. Read more »
Submitted by ben on Thu, 11/04/2010 - 11:08
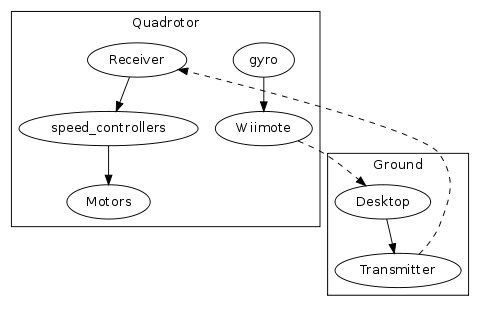
Rebuilt from revision 1. A Wiimote with Wii Motion Plus is used for inertial sensing. The electronics consist of an RC receiver, motor drivers, and the Wiimote. Control calculations are done on a desktop computer which receives inerial measurements from the Wiimote over bluetooth and sends motor commands through a modified RC transmitter. This adds latency which may be a major cause of the trouble I'm having keeping the aircraft stable.
Total weight: 1446g.
Block diagram:
 Read more »
Read more »
Submitted by ben on Thu, 08/26/2010 - 16:55
Here's how I control the lights in my apartment:

 Read more »
Read more »